新コックピット7
20251204
現在の訪問者数
ビューカウント
 |
Youtubeで写真のようなモーションプラットフォームを自作した動画を見つけました。 私もフライトシム用のモーションプラットフォームを作って見たいと思いました。 自由度は2DOF、つまりローリングとピッチングの2軸です。 予算は10,000円です。 果たして本当に10,000円で2DOFのモーションプラットフォームができるか。 ご期待ください。 |
 |
まず部品探しから始めます。 最も悩んだのはローリングとピッチングの回転軸になるユニバーサルジョイントです。 最終的には写真のような十字シャフトが見つかりました。 これが見つかる前はドアに使う蝶番を組み合わせてできないかとか、2枚の揺動板を組み合わせるとかいろいろ考えました。 いくつかの動画を見ている間に写真のような車のプロペラシャフトに使われるユニバーサルジョイントの十字シャフトを利用できる事が分かりました。 軸の直径は25mmで、十字の長さは両方とも77mmです。 耐加重は確認できませんがサイズ的に見て約100kgを支える事は可能と思います。 使っていてもし耐加重が不足したらサイズを大きくしようと思います。 つるつるの部分は円筒状になっていて内側にニードルベアリングを内蔵しています。 価格はMonotaroで2,160円でした。 意外と安い物ですね。 1個購入しました。 |
 |
次に問題となるのが十字シャフトを支える軸受け金具です。 写真は車のプロペラシュフトのユニバーサルジョイント部分です。 赤丸で示したヨーク型金具が2個必要です。 注文した十字シャフトが使われている車種が分かればそのメンテナンスパーツとして車屋さんに注文できるかもしれませんが車の車種が特定できませんでした。 入手困難なので3Dプリンターで作ろうと思います。 縦横高さ共に200mmを超えていないのでサイズ的には可能です。 樹脂になる事で強度が不足すると思うのでできる範囲で肉厚を厚くしようと思います。 |
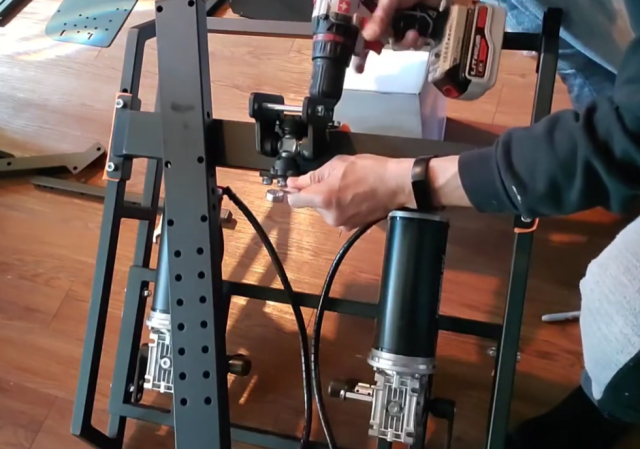 |
参考の写真です。 これはDOF REALITY社の2DOFプラットフォームの組み立て中の写真です。 触っている部分に十字シャフトがあります。 サイズはそれほど大きくないです。 |
 |
写真はロッドエンドベアリングです。 モーターからの往復運動を座席に伝えるのに使います。 座席はローリングとピッチングで2方向に傾斜するのでその傾斜分を吸収するためにこの部品が必要です。 ボール型のベアリングが入っているので座席の動きを吸収できます。 モノタロウで税込み1個505円でした。 試しに1個だけ購入しました。 次の4個セットを使いますのでこの金額は合計に含まない事にします。 |
 |
amazonでも同じものが販売されていました。 中国製のようです。 こちらはロック用のナットも付いています。 価格はで4個セットで1,029円です。 安いです。 1セット購入しました。 ここまでの合計3,189円 支点から200mm離れた位置で40mm上下するとしたら角度が何度になるか計算してみました。 sinθ = 40/200 θ = arcsin(0.2) θ = 11.5度 20度程度まで動かしたいところですが難しいので最初はこの辺で良しとします。 シミュレーションでリアリティの向上が目的なので航空機の最大傾斜を30度と仮定したらその1/3程度でいいんじゃないかと考えました。 |
 |
中古のワイパーモーターです。 ヤフオクで1,000~2,000円で買えそうです。 2個使います。 1台2,000円で購入したとしてここまでの合計7,189円 レバーの長さを50mmとしプラスマイナス60度回転するとプラスマイナス 43mmの上下移動が得られます。 モーターのトルクが10Nmと仮定すると1kgmのトルクという事になります。 レバー長さ50mmで上下動の力は、 1X(1000/50)=20kg 座席の全荷重がこのモータの負荷になるわけではありません。 支点から200mm離れた位置で20kgの力があれば支えられるのではないかと考えます。 足りなかったらその時また考えます。 |
 |
写真はArduino UNOマイコンボードです。 PCのUSB端子と接続してPCからの制御信号をモータードライバに伝えるのに使います。 価格はamazonで708円です。 ここまでの合計7,897円 |
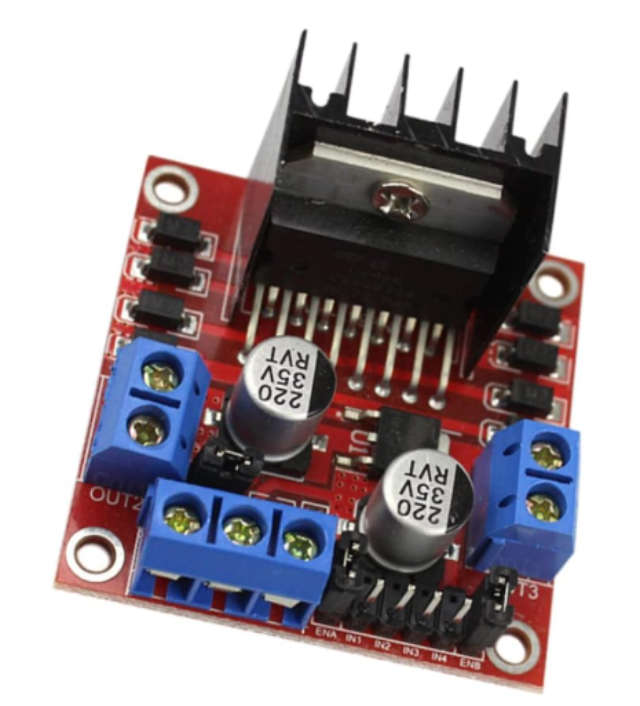 |
モータードライバーです。 2台のモーターの正転、逆転を制御できます。 L298N モータードライバー価格はamazonで365円です。出力電流が不足していて使えないのでこの金額は合計に含めません。 |
 |
上のモータードライバーは出力電流が2Aでした。 不足すると思うので下記を使用する事になると思います。 BTS7960モータードライバー 出力電流は30Aです。 価格はamazonで2個で1,500円です。 ここまでの合計9,397円 |
 |
12V30Aの直流電源です。 amazonで2,980円 ここまでの合計12,377円。 1万円を少しオーバーしました。 後、木材等に4,000円程使うとして全合計は16,377円になります。 16,377円で2DOFのモーションプラットフォームが完成したらすごいと思います。 |
 |
2020/12/09 ユニバーサルジョイント用の十字シャフトが届きました。 中央の穴はグリスニップルを取り付ける穴です。 |
 |
なるほどこういう構造なんですね。 筒の中に見える棒状のものはニードルローラーベアリングというようです。(ニードルとは針を意味する) 黒く見えるのはグリス漏れを停めるゴム製のシールですね。 十字シャフトがテーパーになっています。 ピッタリするまで差し込むようになっています。 外方向に抜けないようにする必要があります。 通常は受け金具の方にスナップリングがはまる溝があるのでそのスナップリングで抜け止めします。 今回は軸受けを3Dプリンターで作りますので別の方法で抜け止めを考える必要があります。 穴を貫通させないかまたは穴径を小さくして停める方法を予定しています。 |
 |
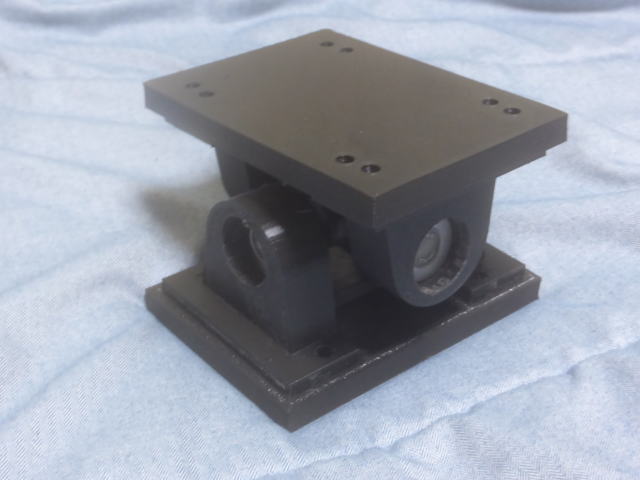
十字シャフトを固定する軸受けを3Dプリンターで作りました。 試作品のため十字シャフトの穴は貫通しています。 |
 |
十字シャフトに取り付けて見ました。 |
 |
傾けて見ました。 30度程度傾けられました。 |
 |
他の方向にも30度程度傾けられました。 全体で100kgの加重がかかります。 強度が足りるか少し心配です。 |
 |
2つに分かれている軸受けが正しい間隔で配置されるようにするためのベースプレートを作りました。 軸受けが正しい位置におさまるようにくぼみを付けてあります。 最終的にはエポキシ系接着剤で接着させる予定です。 |
 |
合わせて見ました。 ピッタリ合いました。 |
 |
斜めにした様子です。 予定の傾斜角度は11.5度です。 20度以上傾斜可能なので問題なしです。 |
 |
2軸を同時に傾斜させてみました。 20度以上はクリアしています。 |
次のページ